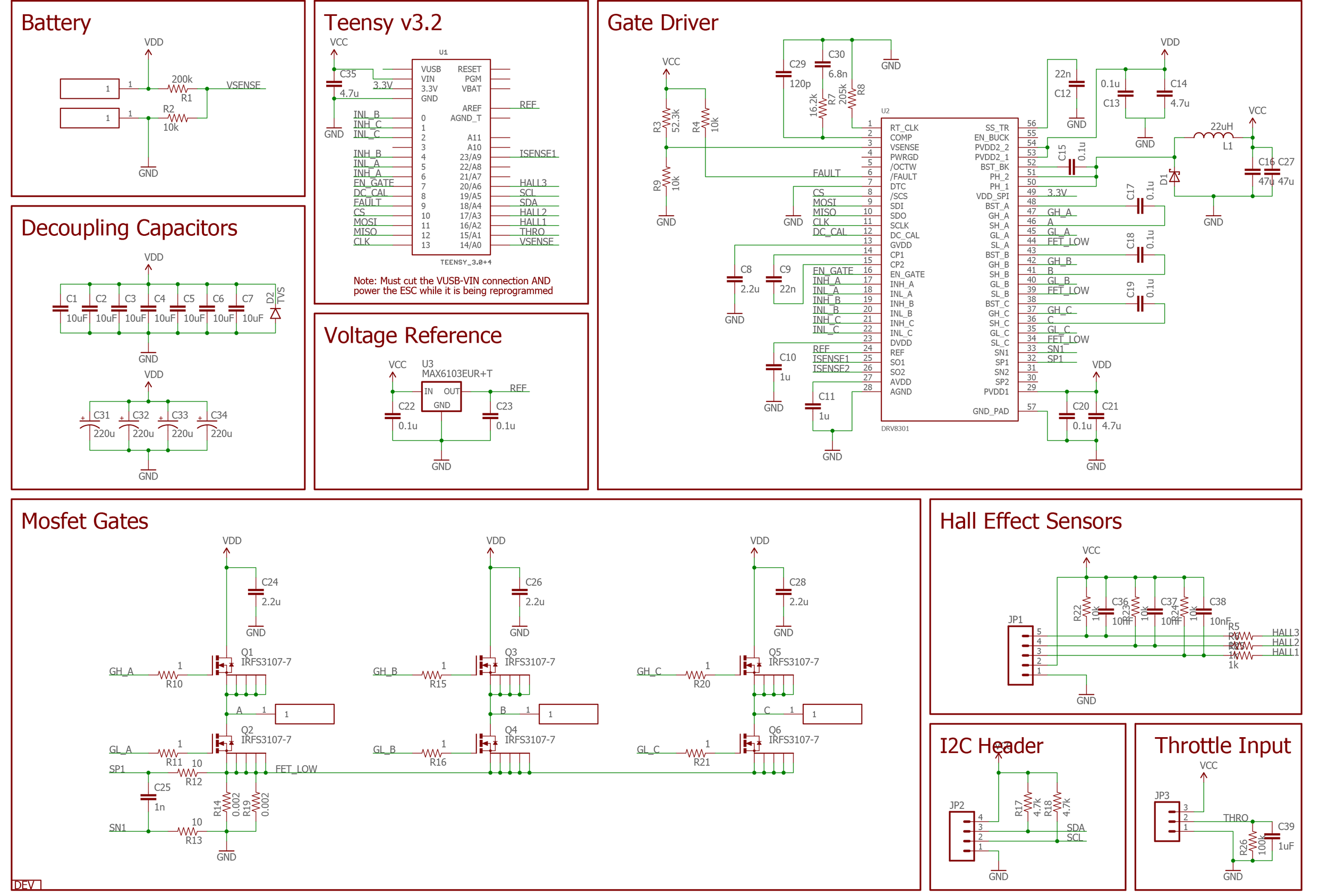

EasyController2, a Simple BLDC Motor Controller

Sonoma Raceway

The World Record Powertrain
Electronics Tutorial 1: Overview of the Electrical System
Before getting into the details of implementation, we have to figure out the broad strokes of how things will fit together. Learn to make voltage and power estimates and get a brief overview of the major components in an electric vehicle.

Electronics Tutorial 0: Crash Course to Basic Electronics
The first of a series of tutorials on electronics design, this provides an introduction to fundamentals of electronics touching on voltage/current/power, resistors/capacitors/inductors, and MOSFETs.
Thumbnail source: https://pxhere.com/en/photo/1152818

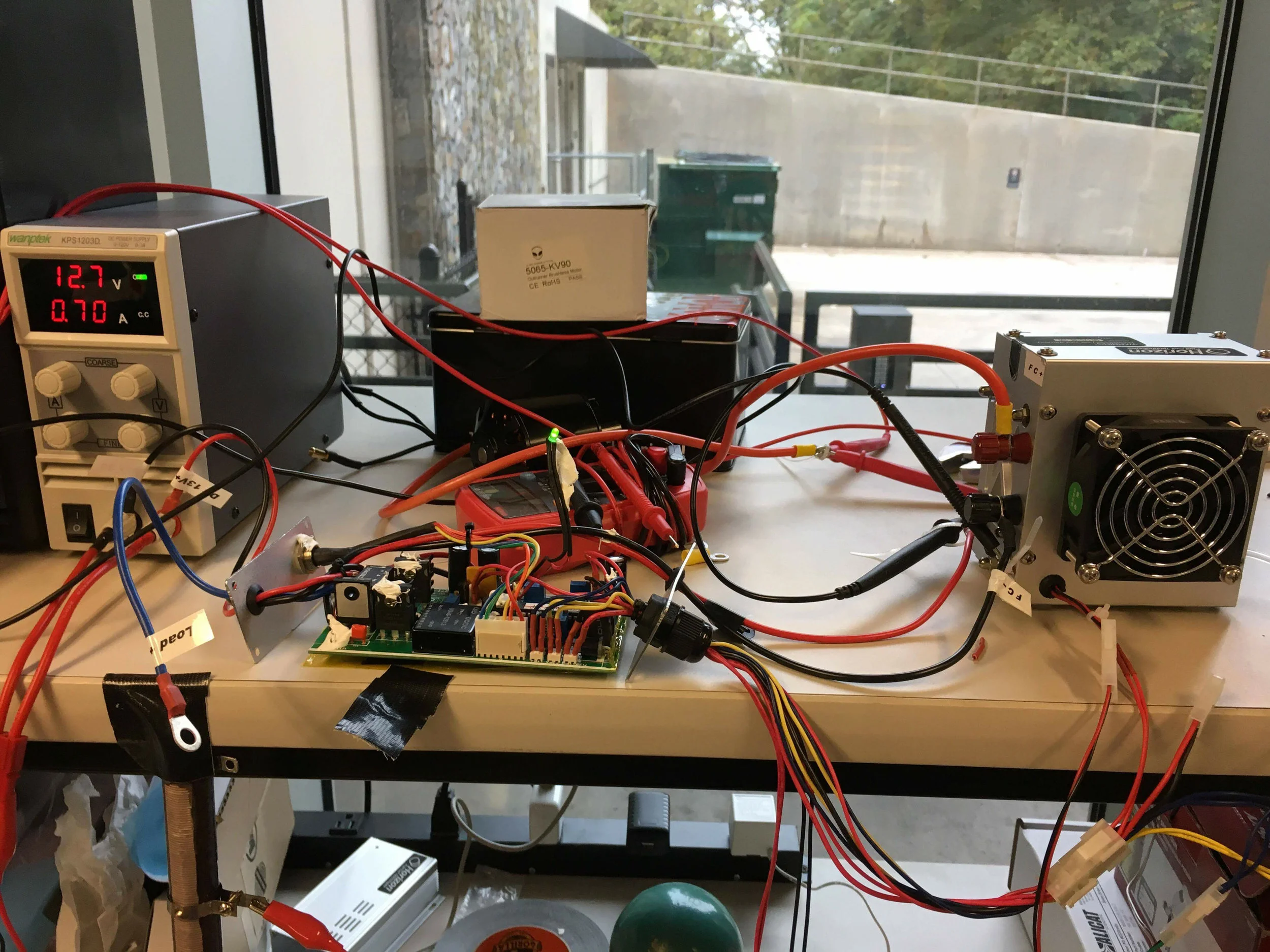
SEM 2018 Fuel Cell Controller and Converter
We’d like to share the technology that went into our winning 2018 hydrogen fuel cell electrical system. Read about it here.
DEV Competition Video 2016